记者26日从中国航天科工集团二院二部获悉,该部群智感知创新中心的四足机器人智能感知系统研究工作取得突破性进展,可实现基于视觉方案的自主定位与地图构建功能,能在1分钟内对1000平方米区域进行地图构建,具有较高的智能化与实用化水准。
据悉,这套系统如同机器人的眼睛和大脑,将搭载于某型国产四足机器人。该机器人目前已具备人员跟随、自动避障与环境建模功能。
该系统研制团队负责人郭睿介绍,爬楼梯、跨越障碍物这类行为是传统轮式机器人很难做到的,而四足机器人可轻松应付复杂地形,在探险救援、反恐防爆等场景中具有很大应用潜力。打造智能感知系统,正是要赋予四足机器人“观察”与“规划思考”的能力。
不过,四足机器人运动方式灵活,机身起伏振动剧烈,高动态环境会使视觉传感系统成像效果大打折扣。对此,研制团队依托自主可控深度学习算法、智能芯片、SLAM(同步定位与地图构建)等关键技术,提出一种结合双目相机、惯性测量单元等多种传感器的低成本多模融合智能感知系统方案,可以在机身剧烈起伏振动的高动态环境下,实现自主定位与三维语义地图构建功能,构图实时性达每秒20帧,地图分辨率精度达到厘米级。这一突破显著提高了四足机器人的智能化与实用化水平。
-

深圳一男子加油站拔油枪点燃后逃跑 警方已介入调查纵火人员已锁定
头条 21-12-17
-

这位感动千万抖音网友的河南“留虾女孩” 入选央视年度短片《2021看见笑容》
头条 21-12-17
-

泪目!95岁妈妈病床前亲吻74岁生病的女儿 网友:孩子不管多大都是妈妈的宝贝
头条 21-12-15
-
川妹子抽中50颗榴莲直呼吃不完!网友:可以共享你的负担吗?
头条 21-12-15
-
河南省政府发布2022年元旦放假通知
头条 21-12-15
-
濮阳市聚碳新材料产业联盟成立
头条 21-12-15
-
周口机场预计什么时候建好?都有到哪些城市的航线?官方回复来了
头条 21-12-15
-
预计明年超50家企业回归,瑞银称中概股H股上市将继续升温
头条 21-12-15
-
新乡发现一境外输入奥密克戎病例密接者,活动轨迹公布
头条 21-12-15
-
河南:中药配方颗粒不得在医疗机构以外销售
头条 21-12-15
-
中原环保完成发行5亿元超短融,利率2.95%
头条 21-12-15
-
南阳市政府将与中车四方所在新能源装备等领域开展深入合作
头条 21-12-15
-
郑州出台新措施:公租房可“掌上”缴租秒办理
头条 21-12-15
-
国家统计局:11月社会消费品零售总额增长3.9%
头条 21-12-15
-
中国11月规上工业增加值同比增长3.8%
头条 21-12-15
-
1207万!全年就业超额完成预期目标
头条 21-12-15
-
河南凯旺科技公开发行2396万股新股,获6321.47倍申购
头条 21-12-15
-
事关货币政策、房地产、全面注册制,一行两会划定明年工作重点
头条 21-12-15
-
隔夜欧美·12月15日
头条 21-12-15
-
多部委密集部署明年工作!三大看点值得关注
头条 21-12-15
-
立方风控鸟·早报(12月15日)
头条 21-12-15
-
医药巨头今日登陆科创板!高瓴重仓"陪伴",引入"绿鞋"机制
头条 21-12-15
-
皮海洲:临门一脚踏刹车!龙竹科技终止转板说明了什么
头条 21-12-15
-
立方风控鸟·晚报(12月14日)
头条 21-12-14
-
成渝地区双城经济圈建设2022年拟推进160个重大项目,投资约2万亿元
头条 21-12-14
-
总投资额超百亿!中建七局接连中标两个EPC总承包项目
头条 21-12-14
-
2022年部分地方债提前下达,财政提前发力稳经济
头条 21-12-14
-
信阳华信投资集团10亿元中票完成发行,利率3.70%
头条 21-12-14
-
新强联拟择机出售所持明阳智能股票
头条 21-12-14
-
洛阳新强联拟亿元入股山东拟IPO公司,持股4.50%
头条 21-12-14
-
焦作在这场推介会上现场签约28个项目,总投资240亿元
头条 21-12-14
-
河南7种轻微交通违法可免罚
头条 21-12-14
-

广州高校发现古墓考古专业出动!网友:这不巧了嘛!毕业论文自己找来了
头条 21-12-14
-

浙江乐清民警自曝37岁未婚救下轻生女子 网友:一定要最爱自己
头条 21-12-14
-

画面感太强!主人出差猫咪打开水龙头把家淹了 网友:当然是原谅它
头条 21-12-09
-
8岁双胞胎姐妹玩捉迷藏捡到20万摆地摊妈妈报警找失主 网友纷纷点赞
头条 21-12-08
-

女子9楼坠落紧紧抓住7楼防护窗所幸有惊无险!网友:不幸中的万幸啊
头条 21-12-07
-

江西一年级萌娃穿航天服走方阵 网友:可可爱爱的小小航天员
头条 21-12-06
-

女子精心养了半年的盆栽竟是塑料做的 网友:这是做的有多真
头条 21-11-30
-

河南郑州一女子怀上八胞胎!医生一句话说出罕见原因 全家又喜又忧
头条 21-11-26
-

央视新闻AI手语主播正式亮相!网友:专业!第一反应就想到了朱广权
头条 21-11-25
-
网信办:严防违法失德艺人“曲线复出” 营造积极健康向上的网络环境
头条 21-11-24
-

神奇!女子用砂锅煮绿豆粥自动吐皮 网友:这个锅好“懂事”
头条 21-11-23
-

湖南一怀孕老师晕倒学生们立刻化身“闪电侠”飞奔相救
头条 21-11-23
-

26岁癌症女孩刷单被骗23万救命钱 想挣外快结果救命钱打了水漂
头条 21-11-23
-
河南郑州六旬白发教授夜访男寝教微积分:都追到宿舍再学不会就对不起老师
头条 21-11-19
-

男子捡枪上交进门瞬间吓坏警察迅速拔枪警戒 网友:进门倒是说一声啊
头条 21-11-19
-

硬核!男子酒后执意开车被兄弟卸掉轮胎 网友:这才是真朋友啊!
头条 21-11-18
-

撒贝宁时隔4年回归主持今日说法 网友激动喊话:“爷青回”
头条 21-11-18
-
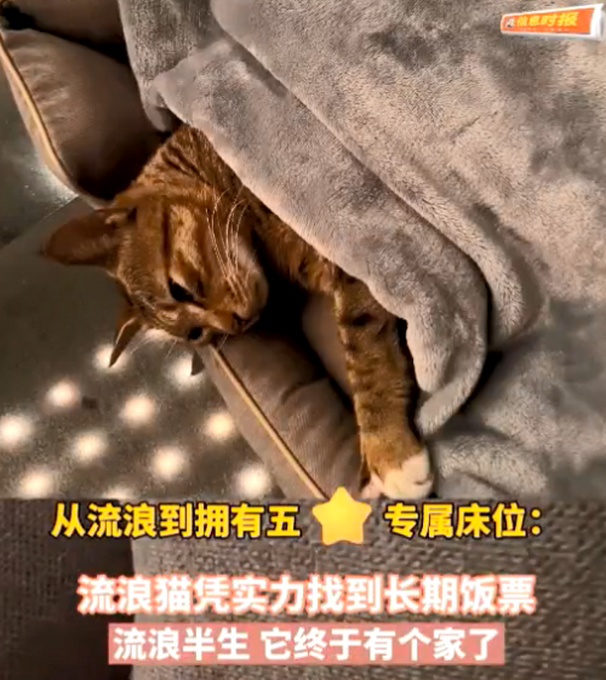
广州一流浪猫被五星级酒店收留凭实力找到长期饭票 每天吃米其林星级员工餐
头条 21-11-17
-
考研冲刺倒计时大学生拿灯管学习?消防员蜀黍顺着网线找来了!
头条 21-11-16
-
经商奇才!长春女子为南方人雪地代写6天赚300元 网友:雪起码得分三成
头条 21-11-16
-

实用又好看!陕西渭南村民在院墙上栽满仙人掌防盗 网友:真的很好看~
头条 21-11-15
-

果农“为国家做研究”捐橘子 网店老板找到了!老板:大家理性消费
头条 21-11-15
-
大乌龙!星空灯下男子捧花告白跪错人 网友:社死现场!
头条 21-11-15








































































- 北京通州区通报一确诊病例所在的华卿画室未2021-12-20
- 西安全市中小学幼停课!咸阳机场加强防控!2021-12-20
- 香港特区第七届立法会选举 香港各界人士:2021-12-20
- 一次成功的选举,开启香港民主新起点2021-12-20
- 外交部驻港公署:新选制重塑立法会新面貌、2021-12-20
- 国务院港澳办:反中乱港分子及外部支持势力2021-12-20
- 上燃动力20载辉煌,重磅推出新技术、新品牌2021-12-20
- 海南文物艺术品市场日渐繁荣,大唐西市积极2021-11-17
- 中铝国际“六连板” 公司称不涉及盐湖提锂2021-12-20
- 12月基金发行热度再起 年末发行迎来小高峰2021-12-20
- 受上游行情影响进行相关调整 硅片价格继续2021-12-20
- 北向资金周内净买入超百亿 本周7只新股将2021-12-20
- “长安时辰”潮味浓,大唐西市“最唐潮”!2021-08-09
- 2021年医药板块走势“一波三折” 创新生2021-12-20
- 把“蛋糕”做大分好有序推进共同富裕 让发2021-12-20
- 破解“急难愁盼”民生领域改革敲定任务书 2021-12-20
- 农业农村部:逐步补上农村公共服务短板 让2021-12-20
- 全国累计办理制造业中小微企业延缓缴纳税费2021-12-20
- 公开征求意见!证监会拟修订沪伦通规则拓展2021-12-20
- 郑州市交通运输局:2021年底前实现第二绕城2021-12-20
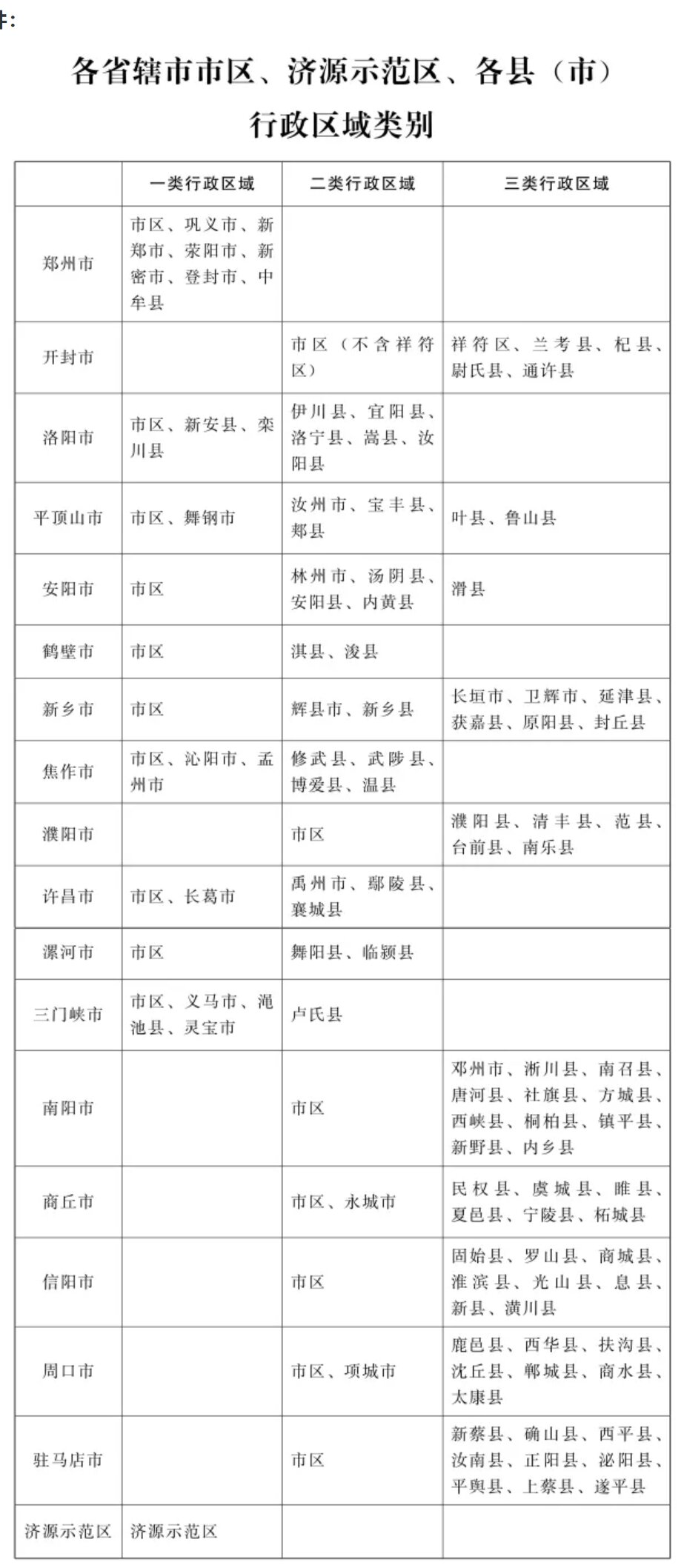
- 河南调整最低工资标准!一类行政区域2000元2021-12-20
- 郑州将迎下半年最冷周末最低气温或跌至-7℃2021-12-20
- 河北省公布义务教育阶段校外培训机构禁止性2021-12-20
- 《南京市中小学生营养午餐指南》(2021版)2021-12-20
- “十四五”我国将大力提高技工待遇 推动高2021-12-20
- 修订后的《高等学校思想政治理论课建设标准2021-12-20
- 内地奥运健儿与澳门青少年运动员开展对话交2021-12-20
- 香港中联办声明:祝贺香港特区第七届立法会2021-12-20
- 今日起 石家庄市区小学生和幼儿上下学免费2021-12-20
- 江西南昌杀妻抛尸案二审维持死刑:被告人主2021-12-20
精彩推荐


阅读排行
- 河南调整最低工资标准!一类行政区域2000元/月小时最低工资标准19.6元
- 降温!暴雪!本周河南气温将出现今年入冬以来最低值 最高气温降至0~2℃
- 河南高纯石英砂提纯技术获突破 提纯二氧化硅纯度达到了99.998%
- 鹤壁辛村遗址发现殷遗民贵族墓葬
- 河南省《通知》 确定175家企业为知识产权强企
- 河南出台《方案》 到2025年公民具备科学素质比例将超15%
- 11月份河南全省经济运行情况发布 新兴动能持续增强经济运行延续恢复态势
- 提醒!河南省2021年度文物勘探许可证年审工作启动
- 河南提前完成惠民惠农财政补贴资金“一卡通”管理全年目标
- 河南发文加快补齐全民健身场地设施短板 探索“体育+公园”新模式